␛[1mRooFit v3.60 -- Developed by Wouter Verkerke and David Kirkby␛[0m
Copyright (C) 2000-2013 NIKHEF, University of California & Stanford University
All rights reserved, please read http://roofit.sourceforge.net/license.txt
[#0] WARNING:Eval -- Evaluating RooAddPdf without a defined normalization set. This can lead to ambiguos coefficients definition and incorrect results. Use RooAddPdf::fixCoefNormalization(nset) to provide a normalization set for defining uniquely RooAddPdf coefficients!
[#1] INFO:Minization -- RooMinimizer::optimizeConst: activating const optimization
[#1] INFO:Minization -- The following expressions will be evaluated in cache-and-track mode: (bkg,sig1,sig2)
**********
** 1 **SET PRINT 1
**********
**********
** 2 **SET NOGRAD
**********
PARAMETER DEFINITIONS:
NO. NAME VALUE STEP SIZE LIMITS
1 a0 5.00000e-01 1.00000e-01 0.00000e+00 1.00000e+00
2 bkgfrac 5.00000e-01 1.00000e-01 0.00000e+00 1.00000e+00
3 mean 5.00000e+00 2.00000e+00 -1.00000e+01 1.00000e+01
4 sig1frac 8.00000e-01 1.00000e-01 0.00000e+00 1.00000e+00
5 sigma1 5.00000e-01 2.00000e-01 1.00000e-01 1.00000e+01
6 sigma2 1.00000e+00 4.50000e-01 1.00000e-01 1.00000e+01
**********
** 3 **SET ERR 0.5
**********
**********
** 4 **SET PRINT 1
**********
**********
** 5 **SET STR 1
**********
NOW USING STRATEGY 1: TRY TO BALANCE SPEED AGAINST RELIABILITY
**********
** 6 **MIGRAD 3000 1
**********
FIRST CALL TO USER FUNCTION AT NEW START POINT, WITH IFLAG=4.
START MIGRAD MINIMIZATION. STRATEGY 1. CONVERGENCE WHEN EDM .LT. 1.00e-03
FCN=1890.61 FROM MIGRAD STATUS=INITIATE 20 CALLS 21 TOTAL
EDM= unknown STRATEGY= 1 NO ERROR MATRIX
EXT PARAMETER CURRENT GUESS STEP FIRST
NO. NAME VALUE ERROR SIZE DERIVATIVE
1 a0 5.00000e-01 1.00000e-01 2.01358e-01 -1.79143e+01
2 bkgfrac 5.00000e-01 1.00000e-01 2.01358e-01 8.01836e+00
3 mean 5.00000e+00 2.00000e+00 2.35352e-01 -3.18732e+02
4 sig1frac 8.00000e-01 1.00000e-01 2.57889e-01 1.67753e+00
5 sigma1 5.00000e-01 2.00000e-01 1.06123e-01 -2.80511e+01
6 sigma2 1.00000e+00 4.50000e-01 1.63378e-01 -2.79262e+00
ERR DEF= 0.5
MIGRAD MINIMIZATION HAS CONVERGED.
MIGRAD WILL VERIFY CONVERGENCE AND ERROR MATRIX.
COVARIANCE MATRIX CALCULATED SUCCESSFULLY
FCN=1885.34 FROM MIGRAD STATUS=CONVERGED 177 CALLS 178 TOTAL
EDM=0.000199951 STRATEGY= 1 ERROR MATRIX ACCURATE
EXT PARAMETER STEP FIRST
NO. NAME VALUE ERROR SIZE DERIVATIVE
1 a0 7.28245e-01 1.10053e-01 4.01494e-03 -5.30986e-04
2 bkgfrac 4.34386e-01 8.18255e-02 1.44990e-03 -2.37203e-02
3 mean 5.03463e+00 3.36192e-02 1.15677e-04 -1.36017e-01
4 sig1frac 7.78347e-01 9.66774e-02 3.39065e-03 -2.60523e-02
5 sigma1 5.23396e-01 4.47433e-02 4.30203e-04 -2.02274e-01
6 sigma2 1.77668e+00 1.13135e+00 3.09140e-03 2.51106e-02
ERR DEF= 0.5
EXTERNAL ERROR MATRIX. NDIM= 25 NPAR= 6 ERR DEF=0.5
1.237e-02 -7.217e-03 -1.043e-04 -4.043e-03 1.989e-03 1.052e-01
-7.217e-03 6.757e-03 -1.369e-04 4.830e-03 -1.372e-03 -8.173e-02
-1.043e-04 -1.369e-04 1.130e-03 -2.833e-04 -6.480e-05 3.890e-04
-4.043e-03 4.830e-03 -2.833e-04 9.520e-03 1.344e-03 -2.831e-02
1.989e-03 -1.372e-03 -6.480e-05 1.344e-03 2.002e-03 2.936e-02
1.052e-01 -8.173e-02 3.890e-04 -2.831e-02 2.936e-02 1.322e+00
PARAMETER CORRELATION COEFFICIENTS
NO. GLOBAL 1 2 3 4 5 6
1 0.84288 1.000 -0.790 -0.028 -0.373 0.400 0.823
2 0.95650 -0.790 1.000 -0.050 0.602 -0.373 -0.865
3 0.13243 -0.028 -0.050 1.000 -0.086 -0.043 0.010
4 0.87689 -0.373 0.602 -0.086 1.000 0.308 -0.252
5 0.76698 0.400 -0.373 -0.043 0.308 1.000 0.571
6 0.94237 0.823 -0.865 0.010 -0.252 0.571 1.000
**********
** 7 **SET ERR 0.5
**********
**********
** 8 **SET PRINT 1
**********
**********
** 9 **HESSE 3000
**********
COVARIANCE MATRIX CALCULATED SUCCESSFULLY
FCN=1885.34 FROM HESSE STATUS=OK 40 CALLS 218 TOTAL
EDM=0.000205499 STRATEGY= 1 ERROR MATRIX ACCURATE
EXT PARAMETER INTERNAL INTERNAL
NO. NAME VALUE ERROR STEP SIZE VALUE
1 a0 7.28245e-01 1.11109e-01 1.60598e-04 4.74047e-01
2 bkgfrac 4.34386e-01 8.36079e-02 2.89981e-04 -1.31608e-01
3 mean 5.03463e+00 3.36219e-02 2.31353e-05 5.27602e-01
4 sig1frac 7.78347e-01 9.69912e-02 6.78131e-04 5.90402e-01
5 sigma1 5.23396e-01 4.51307e-02 8.60406e-05 -1.15419e+00
6 sigma2 1.77668e+00 1.15533e+00 6.18281e-04 -7.22519e-01
ERR DEF= 0.5
EXTERNAL ERROR MATRIX. NDIM= 25 NPAR= 6 ERR DEF=0.5
1.261e-02 -7.502e-03 -9.635e-05 -4.154e-03 2.084e-03 1.091e-01
-7.502e-03 7.058e-03 -1.441e-04 4.954e-03 -1.470e-03 -8.595e-02
-9.635e-05 -1.441e-04 1.130e-03 -2.873e-04 -6.383e-05 4.916e-04
-4.154e-03 4.954e-03 -2.873e-04 9.583e-03 1.310e-03 -3.000e-02
2.084e-03 -1.470e-03 -6.383e-05 1.310e-03 2.037e-03 3.075e-02
1.091e-01 -8.595e-02 4.916e-04 -3.000e-02 3.075e-02 1.380e+00
PARAMETER CORRELATION COEFFICIENTS
NO. GLOBAL 1 2 3 4 5 6
1 0.84619 1.000 -0.795 -0.026 -0.378 0.411 0.827
2 0.95839 -0.795 1.000 -0.051 0.602 -0.388 -0.871
3 0.13303 -0.026 -0.051 1.000 -0.087 -0.042 0.012
4 0.87775 -0.378 0.602 -0.087 1.000 0.297 -0.261
5 0.77155 0.411 -0.388 -0.042 0.297 1.000 0.580
6 0.94489 0.827 -0.871 0.012 -0.261 0.580 1.000
[#1] INFO:Minization -- RooMinimizer::optimizeConst: deactivating const optimization
RooFitResult: minimized FCN value: 1885.34, estimated distance to minimum: 0.000205499
covariance matrix quality: Full, accurate covariance matrix
Status : MINIMIZE=0 HESSE=0
Floating Parameter FinalValue +/- Error
-------------------- --------------------------
a0 7.2825e-01 +/- 1.11e-01
bkgfrac 4.3439e-01 +/- 8.36e-02
mean 5.0346e+00 +/- 3.36e-02
sig1frac 7.7835e-01 +/- 9.70e-02
sigma1 5.2340e-01 +/- 4.51e-02
sigma2 1.7767e+00 +/- 1.16e+00
RooFitResult: minimized FCN value: 1885.34, estimated distance to minimum: 0.000205499
covariance matrix quality: Full, accurate covariance matrix
Status : MINIMIZE=0 HESSE=0
Constant Parameter Value
-------------------- ------------
a1 -2.0000e-01
Floating Parameter InitialValue FinalValue +/- Error GblCorr.
-------------------- ------------ -------------------------- --------
a0 5.0000e-01 7.2825e-01 +/- 1.11e-01 <none>
bkgfrac 5.0000e-01 4.3439e-01 +/- 8.36e-02 <none>
mean 5.0000e+00 5.0346e+00 +/- 3.36e-02 <none>
sig1frac 8.0000e-01 7.7835e-01 +/- 9.70e-02 <none>
sigma1 5.0000e-01 5.2340e-01 +/- 4.51e-02 <none>
sigma2 1.0000e+00 1.7767e+00 +/- 1.16e+00 <none>
EDM = 0.000205499
-log(L) at minimum = 1885.34
final value of floating parameters
1) RooRealVar:: a0 = 0.728245 +/- 0.111109
2) RooRealVar:: bkgfrac = 0.434386 +/- 0.0836079
3) RooRealVar:: mean = 5.03463 +/- 0.0336219
4) RooRealVar:: sig1frac = 0.778347 +/- 0.0969912
5) RooRealVar:: sigma1 = 0.523396 +/- 0.0451307
6) RooRealVar:: sigma2 = 1.77668 +/- 1.15533
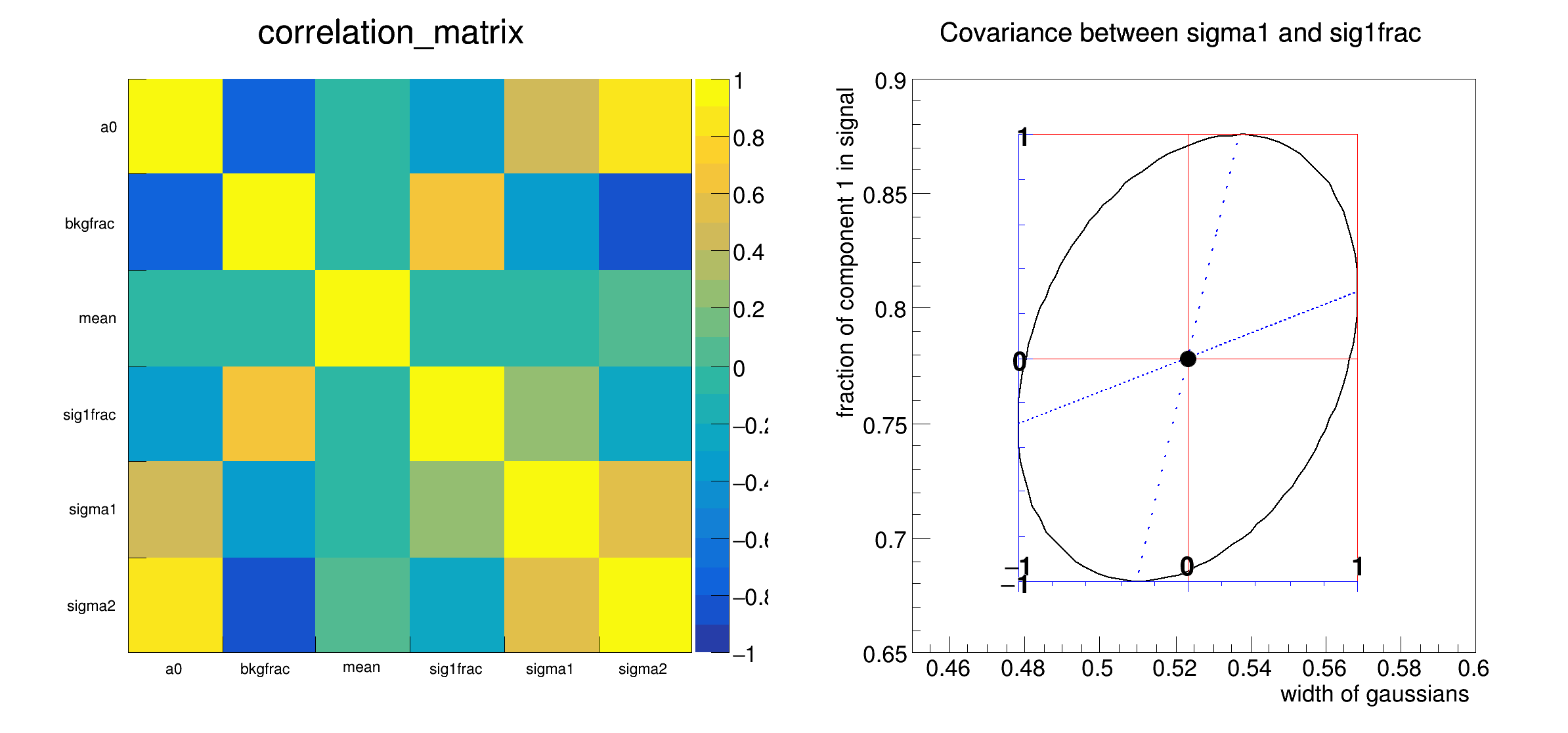
correlation between sig1frac and a0 is -0.377851
correlation between bkgfrac and mean is -0.0510232
correlation matrix
6x6 matrix is as follows
| 0 | 1 | 2 | 3 | 4 |
----------------------------------------------------------------------
0 | 1 -0.7952 -0.02552 -0.3779 0.4111
1 | -0.7952 1 -0.05102 0.6023 -0.3876
2 | -0.02552 -0.05102 1 -0.0873 -0.04206
3 | -0.3779 0.6023 -0.0873 1 0.2966
4 | 0.4111 -0.3876 -0.04206 0.2966 1
5 | 0.8272 -0.8708 0.01245 -0.2609 0.5799
| 5 |
----------------------------------------------------------------------
0 | 0.8272
1 | -0.8708
2 | 0.01245
3 | -0.2609
4 | 0.5799
5 | 1
covariance matrix
6x6 matrix is as follows
| 0 | 1 | 2 | 3 | 4 |
----------------------------------------------------------------------
0 | 0.01261 -0.007502 -9.635e-05 -0.004154 0.002084
1 | -0.007502 0.007058 -0.0001441 0.004954 -0.00147
2 | -9.635e-05 -0.0001441 0.00113 -0.0002873 -6.383e-05
3 | -0.004154 0.004954 -0.0002873 0.009583 0.00131
4 | 0.002084 -0.00147 -6.383e-05 0.00131 0.002037
5 | 0.1091 -0.08595 0.0004916 -0.03 0.03075
| 5 |
----------------------------------------------------------------------
0 | 0.1091
1 | -0.08595
2 | 0.0004916
3 | -0.03
4 | 0.03075
5 | 1.38