class ROOT::Math::Translation3D
Class describing a 3 dimensional translation. It can be combined (using the operator *)
with the ROOT::Math::Rotation3D classes and ROOT::Math::Transform3D to obtained combined
transformations and to operate on points and vectors.
Note that a the translation applied to a Vector object (DisplacementVector3D and LorentzVector classes)
performes a noop, i.e. it returns the same vector. A translation can be applied only to the Point objects
(PositionVector3D classes).
@ingroup GenVector
Function Members (Methods)
public:
Data Members
private:
| ROOT::Math::Translation3D::Vector | fVect | internal 3D vector representing the translation |
Class Charts
{kind=link}
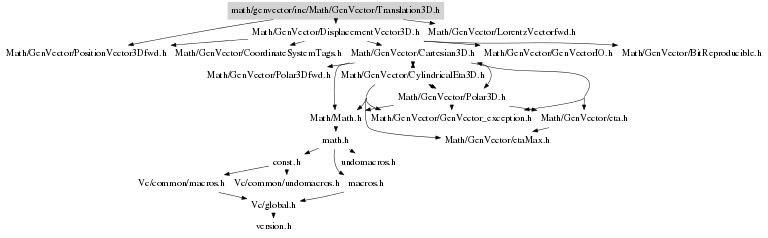{kind=link}
{kind=link}

Function documentation
Translation3D(IT begin, IT end)
Construct given a pair of pointers or iterators defining the
beginning and end of an array of 3 Scalars representing the z,y,z of the translation vector
Translation3D(double dx, double dy, double dz)
Construct from x,y,z values representing the translation
{ }explicit Translation3D( const DisplacementVector3D<CoordSystem,Tag> & v)
Construct from any Displacement vector in ant tag and coordinate system
{ } Translation3D(const PositionVector3D<CoordSystem,Tag> & p1, const PositionVector3D<CoordSystem,Tag> & p2 )
Construct transformation from one coordinate system defined one point (the origin)
to a new coordinate system defined by other point (origin )
@param p1 point defining origin of original reference system
@param p2 point defining origin of transformed reference system
{ }void SetComponents(IT begin, IT end)
Set the 3 components given an iterator to the start of
the desired data, and another to the end (3 past start).
void GetComponents(IT begin, IT end)
Get the 3 components into data specified by an iterator begin
and another to the end of the desired data (12 past start).
PositionVector3D<CoordSystem,Tag> operator()(const ROOT::Math::Plane3D& plane) const
operations on points and vectors
Transformation operation for Position Vector in any coordinate system and default tag
return ! operator==(rhs)