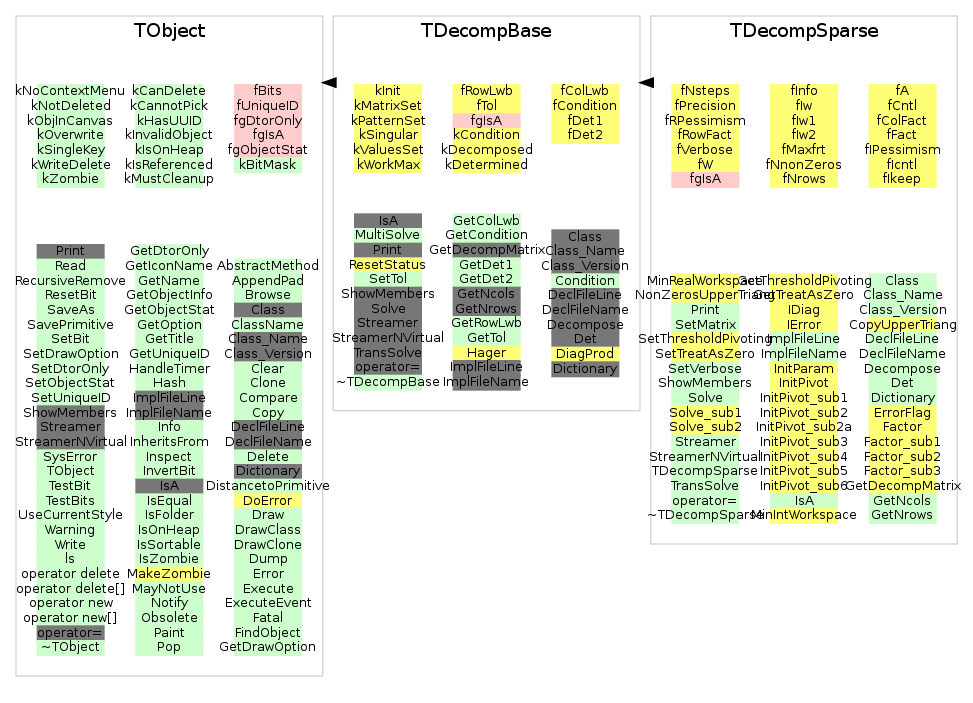
class TDecompSparse: public TDecompBase
Sparse Symmetric Decomposition class Solve a sparse symmetric system of linear equations using a method based on Gaussian elimination as discussed in Duff and Reid, ACM Trans. Math. Software 9 (1983), 302-325.
Function Members (Methods)
public:
| TDecompSparse() | |
| TDecompSparse(const TDecompSparse& another) | |
| TDecompSparse(const TMatrixDSparse& a, Int_t verbose) | |
| TDecompSparse(Int_t nRows, Int_t nr_nonZeros, Int_t verbose) | |
| TDecompSparse(Int_t row_lwb, Int_t row_upb, Int_t nr_nonZeros, Int_t verbose) | |
| virtual | ~TDecompSparse() |
| void | TObject::AbstractMethod(const char* method) const |
| virtual void | TObject::AppendPad(Option_t* option = "") |
| virtual void | TObject::Browse(TBrowser* b) |
| static TClass* | Class() |
| virtual const char* | TObject::ClassName() const |
| virtual void | TObject::Clear(Option_t* = "") |
| virtual TObject* | TObject::Clone(const char* newname = "") const |
| virtual Int_t | TObject::Compare(const TObject* obj) const |
| virtual Double_t | TDecompBase::Condition() |
| virtual void | TObject::Copy(TObject& object) const |
| virtual Bool_t | Decompose() |
| virtual void | TObject::Delete(Option_t* option = "")MENU |
| virtual void | Det(Double_t&, Double_t&) |
| virtual Int_t | TObject::DistancetoPrimitive(Int_t px, Int_t py) |
| virtual void | TObject::Draw(Option_t* option = "") |
| virtual void | TObject::DrawClass() constMENU |
| virtual TObject* | TObject::DrawClone(Option_t* option = "") constMENU |
| virtual void | TObject::Dump() constMENU |
| virtual void | TObject::Error(const char* method, const char* msgfmt) const |
| virtual void | TObject::Execute(const char* method, const char* params, Int_t* error = 0) |
| virtual void | TObject::Execute(TMethod* method, TObjArray* params, Int_t* error = 0) |
| virtual void | TObject::ExecuteEvent(Int_t event, Int_t px, Int_t py) |
| virtual void | TObject::Fatal(const char* method, const char* msgfmt) const |
| virtual TObject* | TObject::FindObject(const char* name) const |
| virtual TObject* | TObject::FindObject(const TObject* obj) const |
| Int_t | TDecompBase::GetColLwb() const |
| Double_t | TDecompBase::GetCondition() const |
| Double_t | TDecompBase::GetDet1() const |
| Double_t | TDecompBase::GetDet2() const |
| virtual Option_t* | TObject::GetDrawOption() const |
| static Long_t | TObject::GetDtorOnly() |
| virtual const char* | TObject::GetIconName() const |
| virtual const char* | TObject::GetName() const |
| virtual Int_t | GetNcols() const |
| virtual Int_t | GetNrows() const |
| virtual char* | TObject::GetObjectInfo(Int_t px, Int_t py) const |
| static Bool_t | TObject::GetObjectStat() |
| virtual Option_t* | TObject::GetOption() const |
| Int_t | TDecompBase::GetRowLwb() const |
| virtual const char* | TObject::GetTitle() const |
| Double_t | TDecompBase::GetTol() const |
| virtual UInt_t | TObject::GetUniqueID() const |
| virtual Bool_t | TObject::HandleTimer(TTimer* timer) |
| virtual ULong_t | TObject::Hash() const |
| virtual void | TObject::Info(const char* method, const char* msgfmt) const |
| virtual Bool_t | TObject::InheritsFrom(const char* classname) const |
| virtual Bool_t | TObject::InheritsFrom(const TClass* cl) const |
| virtual void | TObject::Inspect() constMENU |
| void | TObject::InvertBit(UInt_t f) |
| virtual TClass* | IsA() const |
| virtual Bool_t | TObject::IsEqual(const TObject* obj) const |
| virtual Bool_t | TObject::IsFolder() const |
| Bool_t | TObject::IsOnHeap() const |
| virtual Bool_t | TObject::IsSortable() const |
| Bool_t | TObject::IsZombie() const |
| virtual void | TObject::ls(Option_t* option = "") const |
| void | TObject::MayNotUse(const char* method) const |
| virtual Bool_t | TDecompBase::MultiSolve(TMatrixD& B) |
| virtual Bool_t | TObject::Notify() |
| void | TObject::Obsolete(const char* method, const char* asOfVers, const char* removedFromVers) const |
| static void | TObject::operator delete(void* ptr) |
| static void | TObject::operator delete(void* ptr, void* vp) |
| static void | TObject::operator delete[](void* ptr) |
| static void | TObject::operator delete[](void* ptr, void* vp) |
| void* | TObject::operator new(size_t sz) |
| void* | TObject::operator new(size_t sz, void* vp) |
| void* | TObject::operator new[](size_t sz) |
| void* | TObject::operator new[](size_t sz, void* vp) |
| TDecompSparse& | operator=(const TDecompSparse& source) |
| virtual void | TObject::Paint(Option_t* option = "") |
| virtual void | TObject::Pop() |
| virtual void | Print(Option_t* opt = "") constMENU |
| virtual Int_t | TObject::Read(const char* name) |
| virtual void | TObject::RecursiveRemove(TObject* obj) |
| void | TObject::ResetBit(UInt_t f) |
| virtual void | TObject::SaveAs(const char* filename = "", Option_t* option = "") constMENU |
| virtual void | TObject::SavePrimitive(ostream& out, Option_t* option = "") |
| void | TObject::SetBit(UInt_t f) |
| void | TObject::SetBit(UInt_t f, Bool_t set) |
| virtual void | TObject::SetDrawOption(Option_t* option = "")MENU |
| static void | TObject::SetDtorOnly(void* obj) |
| virtual void | SetMatrix(const TMatrixDSparse& a) |
| static void | TObject::SetObjectStat(Bool_t stat) |
| Double_t | TDecompBase::SetTol(Double_t newTol) |
| virtual void | TObject::SetUniqueID(UInt_t uid) |
| void | SetVerbose(Int_t v) |
| virtual void | ShowMembers(TMemberInspector& insp) |
| virtual Bool_t | Solve(TVectorD& b) |
| virtual Bool_t | Solve(TMatrixDColumn&) |
| virtual TVectorD | Solve(const TVectorD& b, Bool_t& ok) |
| virtual void | Streamer(TBuffer& b) |
| void | StreamerNVirtual(TBuffer& b) |
| virtual void | TObject::SysError(const char* method, const char* msgfmt) const |
| Bool_t | TObject::TestBit(UInt_t f) const |
| Int_t | TObject::TestBits(UInt_t f) const |
| virtual Bool_t | TransSolve(TVectorD& b) |
| virtual Bool_t | TransSolve(TMatrixDColumn&) |
| virtual TVectorD | TransSolve(const TVectorD& b, Bool_t& ok) |
| virtual void | TObject::UseCurrentStyle() |
| virtual void | TObject::Warning(const char* method, const char* msgfmt) const |
| virtual Int_t | TObject::Write(const char* name = 0, Int_t option = 0, Int_t bufsize = 0) |
| virtual Int_t | TObject::Write(const char* name = 0, Int_t option = 0, Int_t bufsize = 0) const |
protected:
| static void | CopyUpperTriang(const TMatrixDSparse& a, Double_t* b) |
| static void | TDecompBase::DiagProd(const TVectorD& diag, Double_t tol, Double_t& d1, Double_t& d2) |
| virtual void | TObject::DoError(int level, const char* location, const char* fmt, va_list va) const |
| Int_t | ErrorFlag() |
| static void | Factor(const Int_t n, const Int_t nz, TArrayI& Airn, TArrayI& Aicn, TArrayD& Aa, TArrayI& Aiw, TArrayI& Aikeep, const Int_t nsteps, Int_t& maxfrt, TArrayI& Aiw1, Int_t* icntl, Double_t* cntl, Int_t* info) |
| static void | Factor_sub1(const Int_t n, const Int_t nz, Int_t& nz1, Double_t* a, const Int_t la, Int_t* irn, Int_t* icn, Int_t* iw, const Int_t liw, Int_t* perm, Int_t* iw2, Int_t* icntl, Int_t* info) |
| static void | Factor_sub2(const Int_t n, const Int_t nz, Double_t* a, const Int_t la, Int_t* iw, const Int_t liw, Int_t* perm, Int_t* nstk, const Int_t nsteps, Int_t& maxfrt, Int_t* nelim, Int_t* iw2, Int_t* icntl, Double_t* cntl, Int_t* info) |
| static void | Factor_sub3(Double_t* a, Int_t* iw, Int_t& j1, Int_t& j2, const Int_t itop, const Int_t ireal, Int_t& ncmpbr, Int_t& ncmpbi) |
| virtual const TMatrixDBase& | GetDecompMatrix() const |
| Double_t | GetThresholdPivoting() |
| Double_t | GetTreatAsZero() |
| Int_t | TDecompBase::Hager(Double_t& est, Int_t iter = 5) |
| static Int_t | IDiag(Int_t ix, Int_t iy) |
| Int_t | IError() |
| void | InitParam() |
| static void | InitPivot(const Int_t n, const Int_t nz, TArrayI& Airn, TArrayI& Aicn, TArrayI& Aiw, TArrayI& Aikeep, TArrayI& Aiw1, Int_t& nsteps, const Int_t iflag, Int_t* icntl, Double_t* cntl, Int_t* info, Double_t& ops) |
| static void | InitPivot_sub1(const Int_t n, const Int_t nz, Int_t* irn, Int_t* icn, Int_t* iw, Int_t* ipe, Int_t* iq, Int_t* flag, Int_t& iwfr, Int_t* icntl, Int_t* info) |
| static void | InitPivot_sub2(const Int_t n, Int_t* ipe, Int_t* iw, const Int_t lw, Int_t& iwfr, Int_t* nv, Int_t* nxt, Int_t* lst, Int_t* ipd, Int_t* flag, const Int_t iovflo, Int_t& ncmpa, const Double_t fratio) |
| static void | InitPivot_sub2a(const Int_t n, Int_t* ipe, Int_t* iw, const Int_t lw, Int_t& iwfr, Int_t& ncmpa) |
| static void | InitPivot_sub3(const Int_t n, const Int_t nz, Int_t* irn, Int_t* icn, Int_t* perm, Int_t* iw, Int_t* ipe, Int_t* iq, Int_t* flag, Int_t& iwfr, Int_t* icntl, Int_t* info) |
| static void | InitPivot_sub4(const Int_t n, Int_t* ipe, Int_t* iw, const Int_t lw, Int_t& iwfr, Int_t* ips, Int_t* ipv, Int_t* nv, Int_t* flag, Int_t& ncmpa) |
| static void | InitPivot_sub5(const Int_t n, Int_t* ipe, Int_t* nv, Int_t* ips, Int_t* ne, Int_t* na, Int_t* nd, Int_t& nsteps, const Int_t nemin) |
| static void | InitPivot_sub6(const Int_t n, const Int_t nz, Int_t* irn, Int_t* icn, Int_t* perm, Int_t* na, Int_t* ne, Int_t* nd, const Int_t nsteps, Int_t* lstki, Int_t* lstkr, Int_t* iw, Int_t* info, Double_t& ops) |
| void | TObject::MakeZombie() |
| Int_t | MinIntWorkspace() |
| Int_t | MinRealWorkspace() |
| static Int_t | NonZerosUpperTriang(const TMatrixDSparse& a) |
| void | TDecompBase::ResetStatus() |
| void | SetThresholdPivoting(Double_t piv) |
| void | SetTreatAsZero(Double_t tol) |
| static void | Solve(const Int_t n, TArrayD& Aa, TArrayI& Aiw, TArrayD& Aw, const Int_t maxfrt, TVectorD& b, TArrayI& Aiw1, const Int_t nsteps, Int_t* icntl, Int_t* info) |
| static void | Solve_sub1(const Int_t n, Double_t* a, Int_t* iw, Double_t* w, Double_t* rhs, Int_t* iw2, const Int_t nblk, Int_t& latop, Int_t* icntl) |
| static void | Solve_sub2(const Int_t n, Double_t* a, Int_t* iw, Double_t* w, Double_t* rhs, Int_t* iw2, const Int_t nblk, const Int_t latop, Int_t* icntl) |
Data Members
public:
| enum TDecompBase::EMatrixDecompStat { | kInit | |
| kPatternSet | ||
| kValuesSet | ||
| kMatrixSet | ||
| kDecomposed | ||
| kDetermined | ||
| kCondition | ||
| kSingular | ||
| }; | ||
| enum TDecompBase::[unnamed] { | kWorkMax | |
| }; | ||
| enum TObject::EStatusBits { | kCanDelete | |
| kMustCleanup | ||
| kObjInCanvas | ||
| kIsReferenced | ||
| kHasUUID | ||
| kCannotPick | ||
| kNoContextMenu | ||
| kInvalidObject | ||
| }; | ||
| enum TObject::[unnamed] { | kIsOnHeap | |
| kNotDeleted | ||
| kZombie | ||
| kBitMask | ||
| kSingleKey | ||
| kOverwrite | ||
| kWriteDelete | ||
| }; |
protected:
| TMatrixDSparse | fA | original matrix; needed for the iterative solving procedure |
| Double_t | fCntl[6] | float control numbers |
| TArrayI | fColFact | |
| Int_t | TDecompBase::fColLwb | Column lower bound of decomposed matrix |
| Double_t | TDecompBase::fCondition | matrix condition number |
| Double_t | TDecompBase::fDet1 | determinant mantissa |
| Double_t | TDecompBase::fDet2 | determinant exponent for powers of 2 |
| TArrayD | fFact | size of fFact array; may be increased during the numerical factorization |
| Double_t | fIPessimism | amounts by which to increase allocated factorization space when |
| Int_t | fIcntl[31] | integer control numbers |
| TArrayI | fIkeep | pivot sequence and temporary storage information |
| Int_t | fInfo[21] | array used for communication between programs |
| TArrayI | fIw | |
| TArrayI | fIw1 | |
| TArrayI | fIw2 | |
| Int_t | fMaxfrt | |
| Int_t | fNnonZeros | |
| Int_t | fNrows | |
| Int_t | fNsteps | |
| Double_t | fPrecision | precision we demand from the linear system solver. If it isn't |
| Double_t | fRPessimism | inadequate space is detected. fIPessimism is for array "fIw", |
| TArrayI | fRowFact | |
| Int_t | TDecompBase::fRowLwb | Row lower bound of decomposed matrix |
| Double_t | TDecompBase::fTol | sqrt(epsilon); epsilon is smallest number number so that 1+epsilon > 1 |
| Int_t | fVerbose | |
| TArrayD | fW | temporary storage for the factorization |
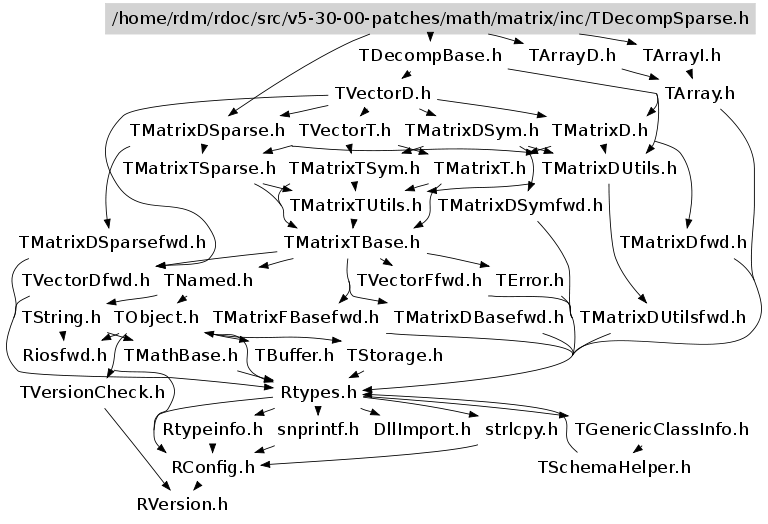
Class Charts
{kind=link}
{kind=link}
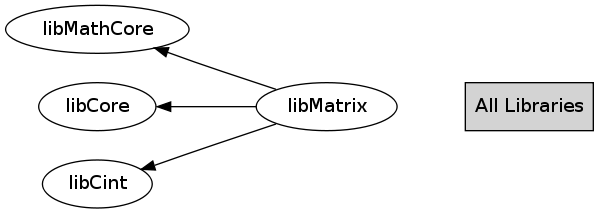{kind=link}

Function documentation
TDecompSparse(Int_t nRows, Int_t nr_nonZeros, Int_t verbose)
Constructor for a matrix with nrows and unspecified number of columns . nr_nonZeros is the total number of non-zero entries in the matrix .
TDecompSparse(Int_t row_lwb, Int_t row_upb, Int_t nr_nonZeros, Int_t verbose)
Constructor for a matrix with row range, [row_lwb..row_upb] and unspecified column range . nr_nonZeros is the total number of non-zero entries in the matrix .
Int_t NonZerosUpperTriang(const TMatrixDSparse& a)
Static function, returning the number of non-zero entries in the upper triangular matrix .
void CopyUpperTriang(const TMatrixDSparse& a, Double_t* b)
Static function, copying the non-zero entries in the upper triangle to array b . User should allocate enough memory for array b .
void InitPivot(const Int_t n, const Int_t nz, TArrayI& Airn, TArrayI& Aicn, TArrayI& Aiw, TArrayI& Aikeep, TArrayI& Aiw1, Int_t& nsteps, const Int_t iflag, Int_t* icntl, Double_t* cntl, Int_t* info, Double_t& ops)
Setup Pivoting variables
void Factor(const Int_t n, const Int_t nz, TArrayI& Airn, TArrayI& Aicn, TArrayD& Aa, TArrayI& Aiw, TArrayI& Aikeep, const Int_t nsteps, Int_t& maxfrt, TArrayI& Aiw1, Int_t* icntl, Double_t* cntl, Int_t* info)
Factorization routine, the workhorse for the decompostion step
void Solve(const Int_t n, TArrayD& Aa, TArrayI& Aiw, TArrayD& Aw, const Int_t maxfrt, TVectorD& b, TArrayI& Aiw1, const Int_t nsteps, Int_t* icntl, Int_t* info)
Main routine for solving Ax=b
void InitPivot_sub1(const Int_t n, const Int_t nz, Int_t* irn, Int_t* icn, Int_t* iw, Int_t* ipe, Int_t* iq, Int_t* flag, Int_t& iwfr, Int_t* icntl, Int_t* info)
Help routine for pivoting setup
void InitPivot_sub2(const Int_t n, Int_t* ipe, Int_t* iw, const Int_t lw, Int_t& iwfr, Int_t* nv, Int_t* nxt, Int_t* lst, Int_t* ipd, Int_t* flag, const Int_t iovflo, Int_t& ncmpa, const Double_t fratio)
Help routine for pivoting setup
void InitPivot_sub2a(const Int_t n, Int_t* ipe, Int_t* iw, const Int_t lw, Int_t& iwfr, Int_t& ncmpa)
Help routine for pivoting setup
void InitPivot_sub3(const Int_t n, const Int_t nz, Int_t* irn, Int_t* icn, Int_t* perm, Int_t* iw, Int_t* ipe, Int_t* iq, Int_t* flag, Int_t& iwfr, Int_t* icntl, Int_t* info)
Help routine for pivoting setup
void InitPivot_sub4(const Int_t n, Int_t* ipe, Int_t* iw, const Int_t lw, Int_t& iwfr, Int_t* ips, Int_t* ipv, Int_t* nv, Int_t* flag, Int_t& ncmpa)
Help routine for pivoting setup
void InitPivot_sub5(const Int_t n, Int_t* ipe, Int_t* nv, Int_t* ips, Int_t* ne, Int_t* na, Int_t* nd, Int_t& nsteps, const Int_t nemin)
Help routine for pivoting setup
void InitPivot_sub6(const Int_t n, const Int_t nz, Int_t* irn, Int_t* icn, Int_t* perm, Int_t* na, Int_t* ne, Int_t* nd, const Int_t nsteps, Int_t* lstki, Int_t* lstkr, Int_t* iw, Int_t* info, Double_t& ops)
Help routine for pivoting setup
void Factor_sub1(const Int_t n, const Int_t nz, Int_t& nz1, Double_t* a, const Int_t la, Int_t* irn, Int_t* icn, Int_t* iw, const Int_t liw, Int_t* perm, Int_t* iw2, Int_t* icntl, Int_t* info)
Help routine for factorization
void Factor_sub2(const Int_t n, const Int_t nz, Double_t* a, const Int_t la, Int_t* iw, const Int_t liw, Int_t* perm, Int_t* nstk, const Int_t nsteps, Int_t& maxfrt, Int_t* nelim, Int_t* iw2, Int_t* icntl, Double_t* cntl, Int_t* info)
Help routine for factorization
void Factor_sub3(Double_t* a, Int_t* iw, Int_t& j1, Int_t& j2, const Int_t itop, const Int_t ireal, Int_t& ncmpbr, Int_t& ncmpbi)
Help routine for factorization
void Solve_sub1(const Int_t n, Double_t* a, Int_t* iw, Double_t* w, Double_t* rhs, Int_t* iw2, const Int_t nblk, Int_t& latop, Int_t* icntl)
Help routine for solving
void Solve_sub2(const Int_t n, Double_t* a, Int_t* iw, Double_t* w, Double_t* rhs, Int_t* iw2, const Int_t nblk, const Int_t latop, Int_t* icntl)
Help routine for solving
void Solve(const Int_t n, TArrayD& Aa, TArrayI& Aiw, TArrayD& Aw, const Int_t maxfrt, TVectorD& b, TArrayI& Aiw1, const Int_t nsteps, Int_t* icntl, Int_t* info)
Double_t GetThresholdPivoting()
Takes values in the range [0,1]. Larger values enforce greater stability in the factorization as they insist on larger pivots. Smaller values preserve sparsity at the cost of using smaller pivots.
{ return fCntl[1]; }void SetThresholdPivoting(Double_t piv)
The factorization will not accept a pivot whose absolute value is less than fCntl[3] as a 1x1 pivot or as the off-diagonal in a 2x2 pivot.
{ fCntl[1] = piv; }void SetVerbose(Int_t v)