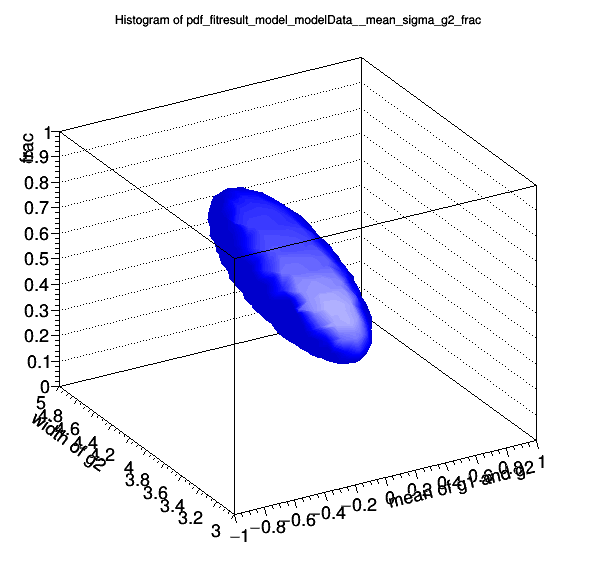
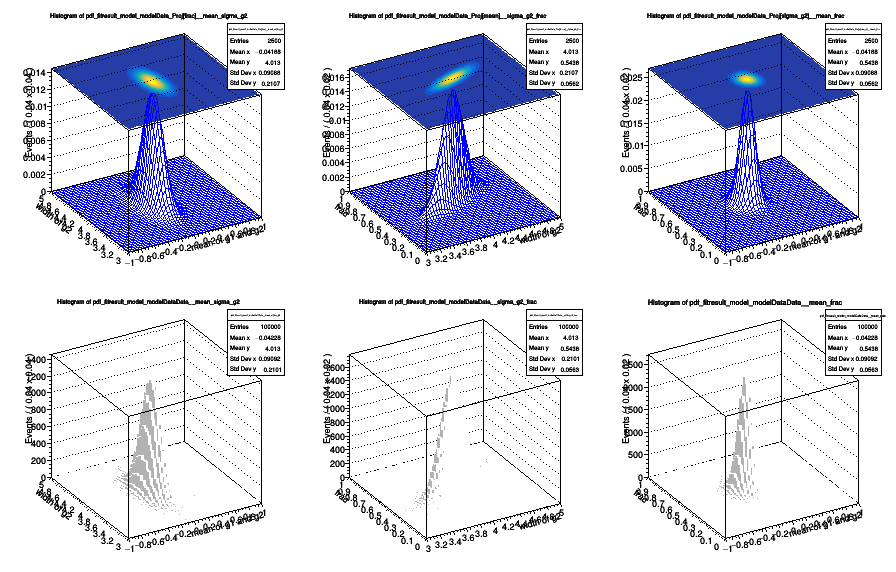
Representing the parabolic approximation of the fit as a multi-variate Gaussian on the parameters of the fitted p.d.f.
Processing /mnt/build/workspace/root-makedoc-v612/rootspi/rdoc/src/v6-12-00-patches/tutorials/roofit/rf608_fitresultaspdf.C...
�[1mRooFit v3.60 -- Developed by Wouter Verkerke and David Kirkby�[0m
Copyright (C) 2000-2013 NIKHEF, University of California & Stanford University
All rights reserved, please read http://roofit.sourceforge.net/license.txt
[#1] INFO:Minization -- RooMinimizer::optimizeConst: activating const optimization
[#1] INFO:Minization -- The following expressions will be evaluated in cache-and-track mode: (g1,g2)
**********
** 1 **SET PRINT 1
**********
**********
** 2 **SET NOGRAD
**********
PARAMETER DEFINITIONS:
NO. NAME VALUE STEP SIZE LIMITS
1 frac 5.00000e-01 1.00000e-01 0.00000e+00 1.00000e+00
2 mean 0.00000e+00 2.00000e-01 -1.00000e+00 1.00000e+00
3 sigma_g2 4.00000e+00 2.00000e-01 3.00000e+00 5.00000e+00
**********
** 3 **SET ERR 0.5
**********
**********
** 4 **SET PRINT 1
**********
**********
** 5 **SET STR 1
**********
NOW USING STRATEGY 1: TRY TO BALANCE SPEED AGAINST RELIABILITY
**********
** 6 **MIGRAD 1500 1
**********
FIRST CALL TO USER FUNCTION AT NEW START POINT, WITH IFLAG=4.
START MIGRAD MINIMIZATION. STRATEGY 1. CONVERGENCE WHEN EDM .LT. 1.00e-03
FCN=2523.5 FROM MIGRAD STATUS=INITIATE 10 CALLS 11 TOTAL
EDM= unknown STRATEGY= 1 NO ERROR MATRIX
EXT PARAMETER CURRENT GUESS STEP FIRST
NO. NAME VALUE ERROR SIZE DERIVATIVE
1 frac 5.00000e-01 1.00000e-01 2.01358e-01 -1.31418e+01
2 mean 0.00000e+00 2.00000e-01 2.01358e-01 4.68351e+00
3 sigma_g2 4.00000e+00 2.00000e-01 2.01358e-01 5.45887e+00
ERR DEF= 0.5
MIGRAD MINIMIZATION HAS CONVERGED.
MIGRAD WILL VERIFY CONVERGENCE AND ERROR MATRIX.
COVARIANCE MATRIX CALCULATED SUCCESSFULLY
FCN=2522.85 FROM MIGRAD STATUS=CONVERGED 50 CALLS 51 TOTAL
EDM=4.43971e-05 STRATEGY= 1 ERROR MATRIX ACCURATE
EXT PARAMETER STEP FIRST
NO. NAME VALUE ERROR SIZE DERIVATIVE
1 frac 5.43820e-01 5.60284e-02 2.70800e-03 8.34315e-02
2 mean -4.18828e-02 9.05559e-02 3.14649e-03 -5.37978e-03
3 sigma_g2 4.01280e+00 2.08953e-01 4.84455e-03 -4.10552e-02
ERR DEF= 0.5
EXTERNAL ERROR MATRIX. NDIM= 25 NPAR= 3 ERR DEF=0.5
3.153e-03 -3.621e-04 8.647e-03
-3.621e-04 8.223e-03 -1.611e-03
8.647e-03 -1.611e-03 4.431e-02
PARAMETER CORRELATION COEFFICIENTS
NO. GLOBAL 1 2 3
1 0.73165 1.000 -0.071 0.732
2 0.08551 -0.071 1.000 -0.084
3 0.73231 0.732 -0.084 1.000
**********
** 7 **SET ERR 0.5
**********
**********
** 8 **SET PRINT 1
**********
**********
** 9 **HESSE 1500
**********
COVARIANCE MATRIX CALCULATED SUCCESSFULLY
FCN=2522.85 FROM HESSE STATUS=OK 16 CALLS 67 TOTAL
EDM=4.43683e-05 STRATEGY= 1 ERROR MATRIX ACCURATE
EXT PARAMETER INTERNAL INTERNAL
NO. NAME VALUE ERROR STEP SIZE VALUE
1 frac 5.43820e-01 5.60802e-02 5.41601e-04 8.77525e-02
2 mean -4.18828e-02 9.05561e-02 6.29298e-04 -4.18951e-02
3 sigma_g2 4.01280e+00 2.09149e-01 9.68910e-04 1.27960e-02
ERR DEF= 0.5
EXTERNAL ERROR MATRIX. NDIM= 25 NPAR= 3 ERR DEF=0.5
3.158e-03 -3.614e-04 8.670e-03
-3.614e-04 8.223e-03 -1.615e-03
8.670e-03 -1.615e-03 4.440e-02
PARAMETER CORRELATION COEFFICIENTS
NO. GLOBAL 1 2 3
1 0.73224 1.000 -0.071 0.732
2 0.08555 -0.071 1.000 -0.085
3 0.73291 0.732 -0.085 1.000
[#1] INFO:Minization -- RooMinimizer::optimizeConst: deactivating const optimization


 ROOT 6.12/07 - Reference Guide Generated on Sat Sep 29 2018 23:42:20 (GVA Time) using Doxygen 1.8.13.
ROOT 6.12/07 - Reference Guide Generated on Sat Sep 29 2018 23:42:20 (GVA Time) using Doxygen 1.8.13.